


RDU-FD-10D无人机视频监控系统
起降灵活:采用垂直起降设计,可在车辆、舰船等移动平台起降,大大减小对起降条件的限制,作业场地适应性强,飞行途中可定点悬停15分钟;
结构简单:采用自锁快装设计,无需任何工具即可在5分钟内完成组装;
操作简便:一次性航行规划,全自主起飞,无需遥控器,一键起降,安全简便;
定位精准:标配RTK实时差分系统,保证降落精度250px以内;
安全稳定:气动经过严格的风洞实验设计,飞行控制采用总能量自适应算法,两者确保姿态稳定,画面图像稳定清晰;
导航可靠:采用双GPS和双磁罗盘多冗余设计,保障飞行更加安全;
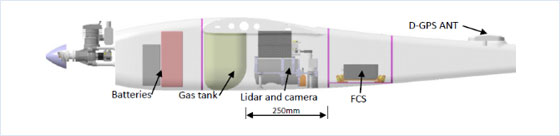
智能电源:全机采用一块电池供电,电源维护管理简便;
侦察能力强:斜距1000m可识别人员,斜距2000m可识别车辆,斜距500米可识别车辆牌号,具有目标跟踪锁定功能,对移动目标可自动跟随飞行,目标定位精度可达10m。
-

 产品介绍
产品介绍 -

 产品展示
产品展示 -

 详细参数
详细参数 -

 产品配件
产品配件
产品介绍
RDU-FD-10D是我公司研发的超近程侦察监视无人机系统,采用复合翼布局形式,实现垂直起降和悬停/巡航即时切换。系统采用双光吊舱(EO/IR)和高清图传,可完成对地面、水面目标进行实时搜索跟踪、锁定识别、定位取证等任务。可单人背负携行,快速展开撤收;人机交互简单、任务规划便捷、自动化程度高、抗风能力强、具备高原性能,适合单人执行例行巡逻和突发事件处置任务。
现有垂直起降固定翼无人机大体分为三种形式:倾转动力式,尾座式和复合翼式。倾转旋翼的倾转机构复杂,重量大,效率不高;尾座式垂直起降形式虽然效率比较高,但是控制上难度高,特别是平飞转悬停过程中很难平顺转换,可靠性比较低。复合翼无人机是一种固定翼无人机垂直起降的解决方案,其以常规固定翼飞行器为基础,增加多轴动力单元,在起降及低速状态下按照多轴模式飞行,通过多个螺旋桨产生的拉力克服重力和气动阻力进行飞行;而在高速状态下,按照固定翼模式飞行,通过气动升力克服重力,通过拉力向前的螺旋桨克服气动阻力实现飞行。与其他两个方式相比,复合翼垂直起降方案无需额外机构,结构简单;不存在大幅度飞行姿态变化,导航解算容易。因此,复合翼垂直起降方案是目前可靠性高、技术风险低的长航时垂直起降无人机方案。
想让飞机垂直起降,除满足飞机机体设计的严格要求,控制方式也非常复杂。RDU-FD-10D的四旋翼起降控制利用了L1自适应控制技术,固定翼平飞控制为基于总能量+神经网络自适应控制技术。同时,RDU-FD-10D还涉及悬停转平飞控制、平飞转悬停控制、一键起降、全自动飞行等控制技术。除了各种控制算法外,技术人员也要考虑到垂直起降、悬停、过渡飞行时的可靠性、安全性。融鼎岳拥有飞行控制系统的核心技术,采用军工品质的硬件架构,确保控制系统的可靠性和环境适应性,通过大量飞行,试验并优化了多种控制参数,使得飞机具有优良的自主飞行性能。
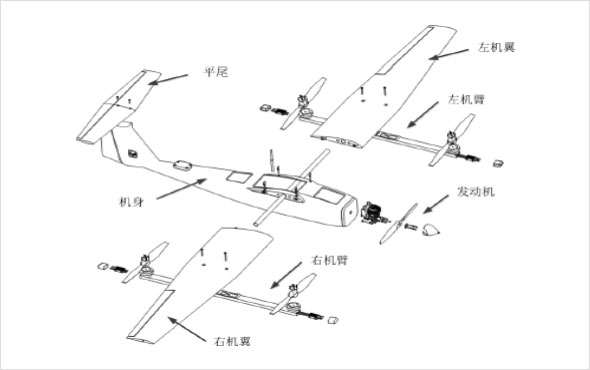
产品展示




详细参数
起飞重量 | 15Kg |
起降方式 | 全自动垂直起降(RTK定位) |
垂直起降动力 | 电机 |
巡航空速 | 70km/h |
巡航动力 | 电机 |
最大续航时间 | 120min |
翼展 | 3.7m |
机身长度 | 1.7m |
最大起飞海拔 | 4000m |
实用升限 | 6500m |
使用环境温度 | -20℃-50℃ |
抗风能力 | 起降抗风4级;巡航抗风5级 |
防雨能力 | 小雨(0.5mm/h) |
载荷重量 | 1-2kg |
载荷设备 | 光电吊舱 |
载荷分辨率 | 可见光:1920*1080(10倍光学变焦)热成像:640*480(长波红外线传感器) |
变焦能力 | 可将光:10倍光学变焦,3倍数字变焦。热成像:2倍数字变焦) |
数、图链路距离 | 可选20km、30km |
实时视频分辨率 | 1080P@30Hz |
包装箱尺寸 | 1080*550*550mm |





